農研機構とARAV株式会社が堆肥舎作業向けに開発した遠隔操作ホイールローダーを公開

外付けが可能なアタッチメントを活用した建設機械の遠隔操作、それらを活用した自動運転技術及びシミュレータを開発・実装しているARAV株式会社(本社:東京都文京区、代表取締役:白久レイエス樹)は、農研機構が11月7日(火)に弊社テストフィールド(千葉県柏市)にて堆肥舎作業向けに開発した遠隔操作ホイールローダーを公開しました。
外付けが可能なアタッチメントを活用した建設機械の遠隔操作、それらを活用した自動運転技術及びシミュレータを開発・実装しているARAV株式会社(本社:東京都文京区、代表取締役:白久レイエス樹)は、農研機構が11月7日(火)に弊社テストフィールド(千葉県柏市)にて堆肥舎作業向けに開発した遠隔操作ホイールローダーを公開しました。
OTHER ARTICLES

福岡県福津市の「林田産業」と関わる中で芽生えた感情
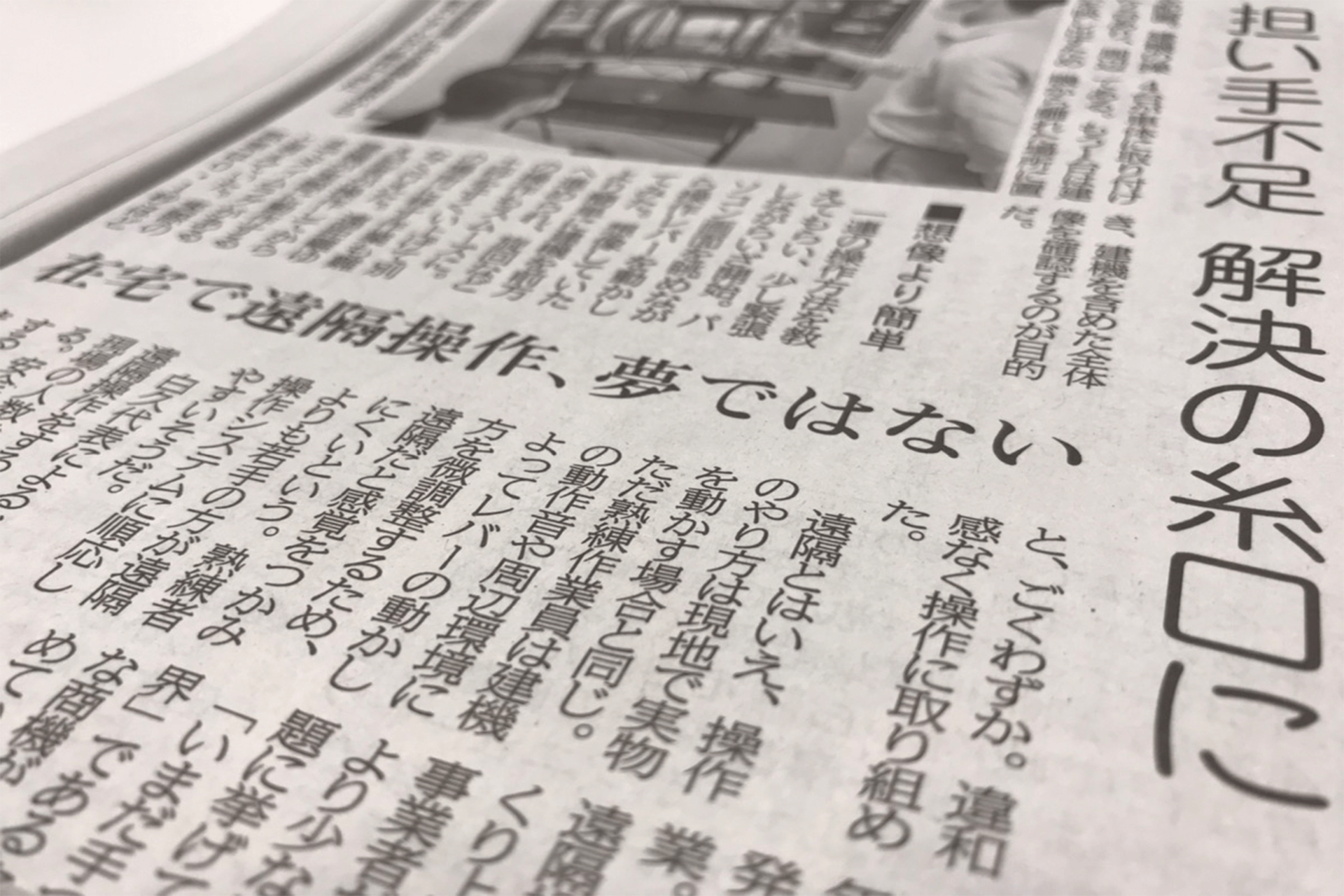
電気新聞様発行の電気新聞にて弊社及び遠隔操作装置が取り上げられました

キャリアダンプ(不整地運搬車)をスマホで遠隔操作成功

日本学術会議と農研機構畜産研究部門主催の公開シンポジウムにて中本が登壇した際の動画が一般公開されました

国土交通省が実施する「建設機械施工の自動化・遠隔化技術に係る現場検証」の実施対象会社にARAV株式会社が選定されました

東大IPCインキュベーションプログラム「東大IPC 1st Round」採択

建設現場のテレワークに貢献、1000km離れても油圧ショベルをインターネット経由で遠隔操作可能

「xTECH Lab MARUNOUCHI」のスピンオフイベントへの登壇

草刈機の遠隔・自動化についてご意見をお聞かせ願えませんでしょうか

「第3回 建設DX展 東京」に建機の遠隔操作・自動運転ソリューションを提供するARAV株式会社が出展

東京大学インキュベーション施設「アントレプレナーラボ」入居

本体改造なしで後付けできるクローラーダンプ遠隔操作システムの実証に成功